Robotics, Perception and AI Projects
Some fun projects I've worked on are shown below. Check out the Programming & more page for code and more.
Image Classification and Captioning

Task: Implemented CNN to classify images in CIFAR-10 dataset to obtain test accuracy of 73% with 60 seconds training. Implemented LSTM Recurrent Neural Network with attention to caption images on the Microsoft COCO dataset.
Key Concepts: Image Classification, Image Captioning, CNN, CIFAR-10, LSTM-RNN, Microsoft COCO
Object Detection using YOLO and Faster R-CNN

Task: Implemented YOLO to detect and classify objects in Pascal VOC to obtain mAP of 12% with 35 mins training. Implemented Faster R-CNN to detect and classify objects in Pascal VOC to obtain mAP of 18% with 30 mins training.
Key Concepts: Object Detection, Neural Networks, YOLO, Faster R-CNN, Pascal VOC 2007, PyTorch
Self-driving cars: Vehicle Image Classification using Transfer Learning

Task: Performed vehicle image classification for images obtained from a GTA V game engine (above image) using Transfer Learning, well-known CNNs, including RESNET-50 and Inception-V3. 73% test accuracy attained.
Key Concepts: Autonomous Vehicle Navigation, Vehicle Classification, Convolutional Neural Networks, Transfer Learning, Inception V3, RESNET-50, Kaggle, PyTorch
Navigating a Self-Balancing Inverted Pendulum Robot with Path-Planning
Task: Implemented and integrated a gyrodometric-based dead-reckoning navigation system and cascaded PID controllers with IMU sensor feedback, to balance and control the robot; enabling it to perform a series of navigation tasks, in a complex obstacle course, using Trajectory Following while maintaining balance.
Key Concepts: C, Gyrodometric Navigation, Dynamic Control, Inverted Pendulum Problem, Trajectory following, MEMS IMU, Beaglebone with Robot Control Library
SLAM Mobile Robot with Particle Filter and Path-Planning
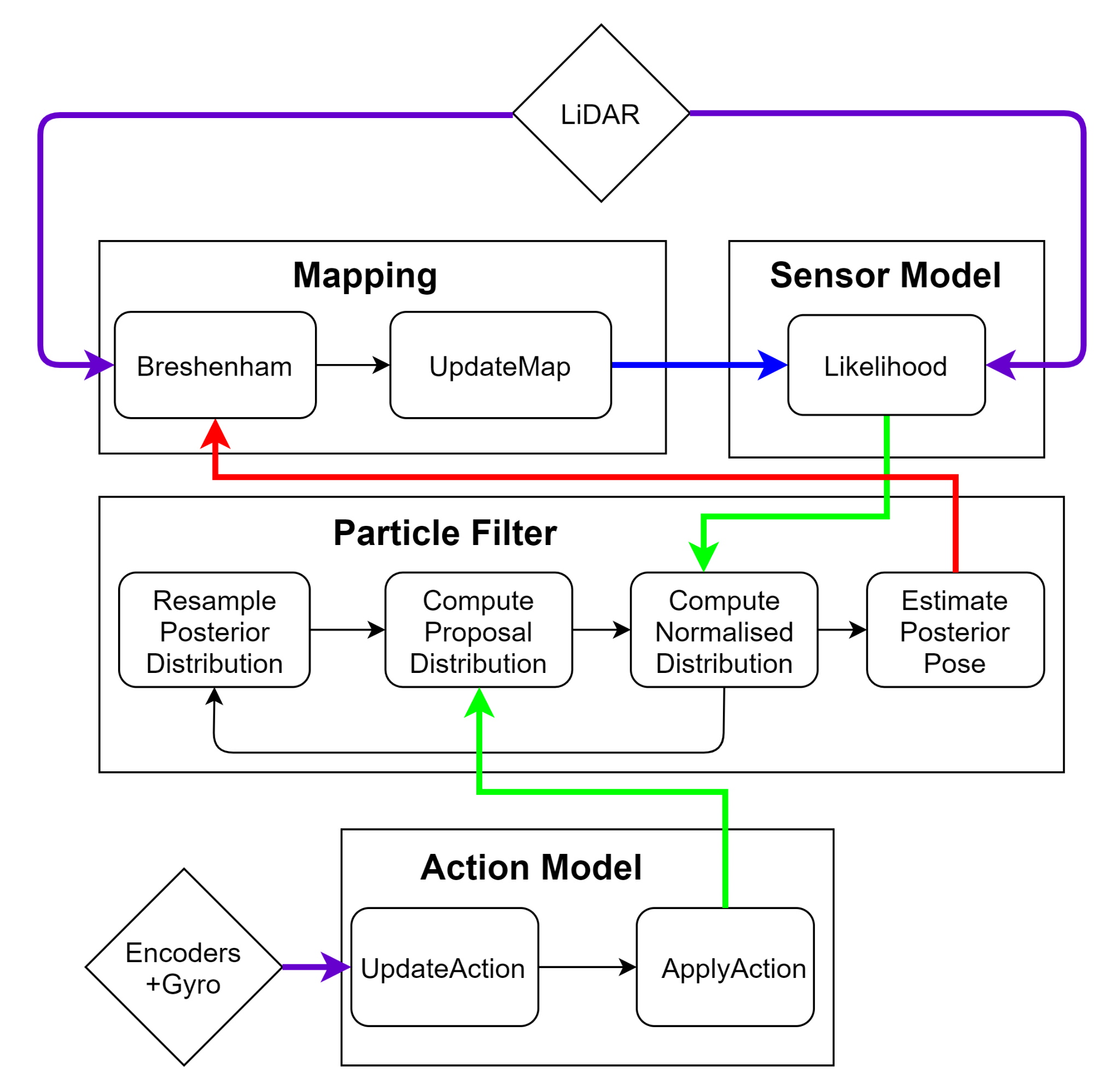
Task: Built a Maze-Mapper SLAM Robot that uses Occupancy-Grid Mapping and Monte-Carlo Localization with LiDAR and odometry data to perform exploration in an unknown environment
Key Concepts: C++, 2D LIDAR, MEMS Inertial Measurement Unit, Quadrature Encoder, Online SLAM, Occupancy Grid Mapping, Monte-Carlo Localization,Particle filter, Obstacle Detection, A* search, Path-planning, Differential-drive ground robot kinematics
6-DOF Robot Arm Manipulation with Kinect RGB-D Camera Sensing
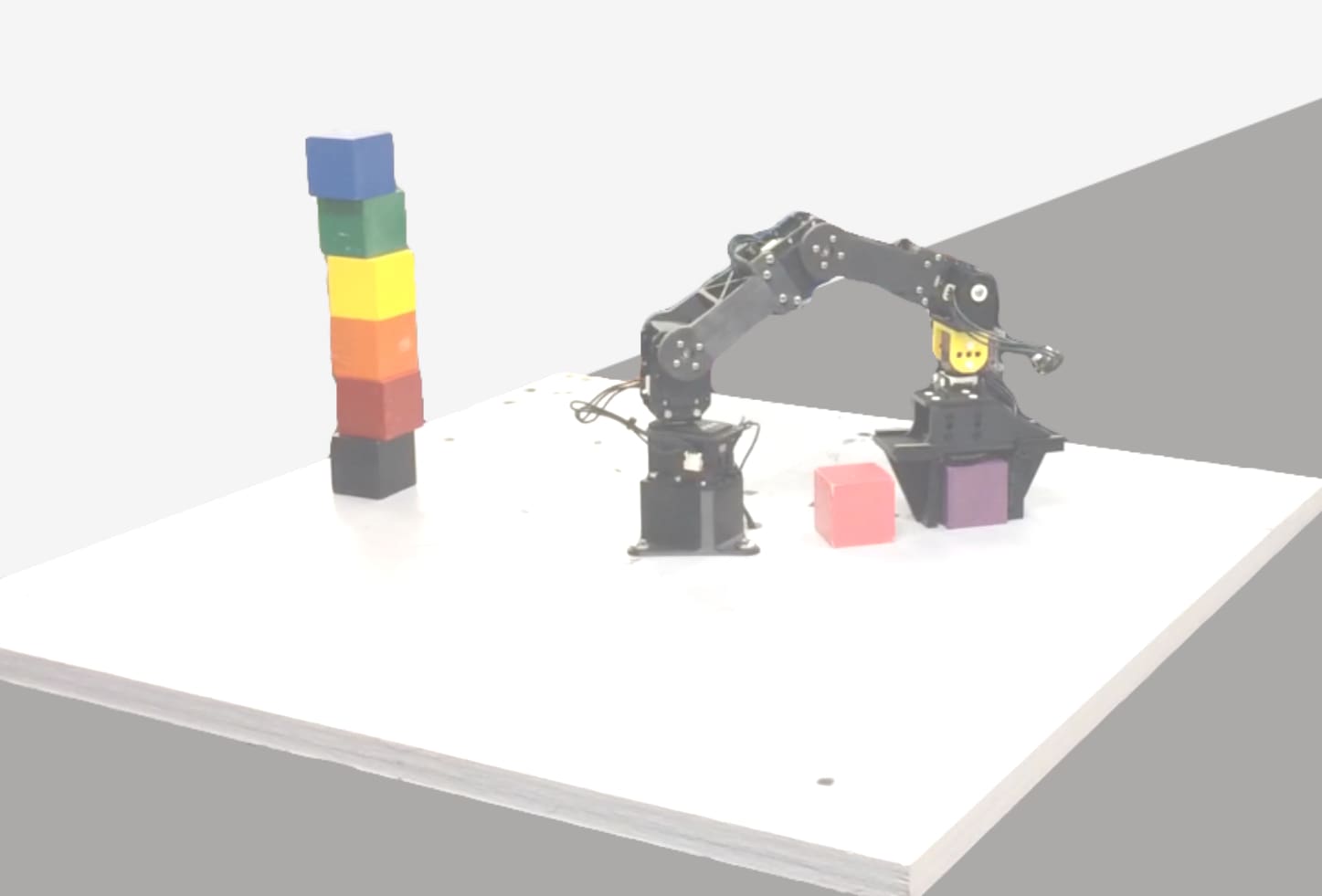
Task: Perform various pick and place tasks with colored blocks.
Key Concepts: Python, Grasping mechanism design and development, Gripper CAD and fabrication, homogeneous coordinate transforms, Manipulator Forward and Inverse Kinematics, Microsoft Kinect, 3D image/workspace calibration, April tag detection and calibration, object detection with OpenCV, color detection, depth imaging with camera sensors, path-planning and path-smoothing, state machines
“RoboPump”- Fully Automated Smart Tire Inflating Robotic System
Task: Built an innovative product that fully automates vehicle tire inflation to minimize safety and sustainability costs associated with improper tire pressure. 70% cheaper than cheapest market alternative. Using Intel Depth Camera, OpenCV, CV algorithm (Python, Arduino IDE), motor-actuated Cartesian Motion Control.
Key Concepts: Python, OpenCV, Cartesian Motion Control, Robotic System, CAD/CAE, FEA/FEM
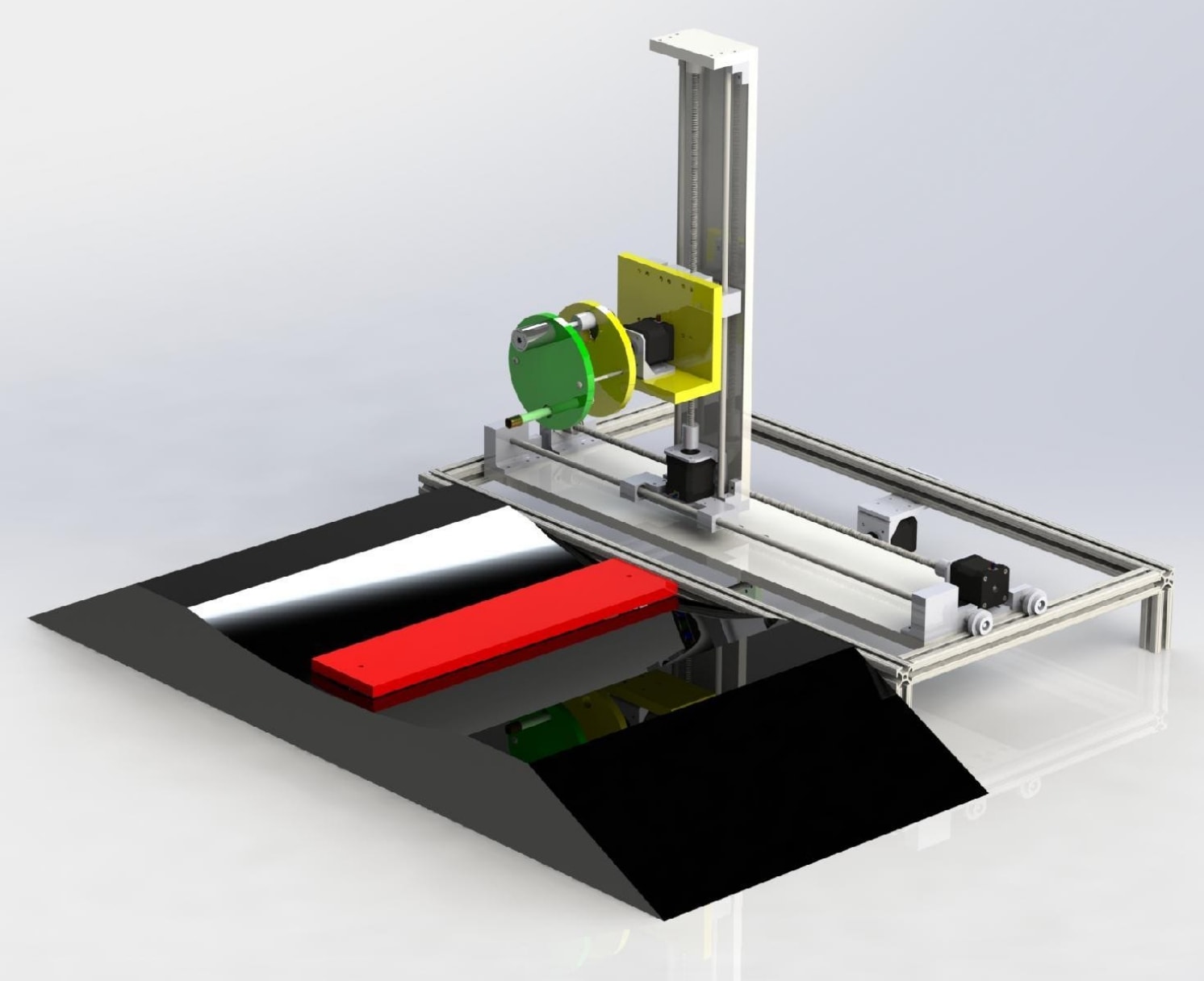
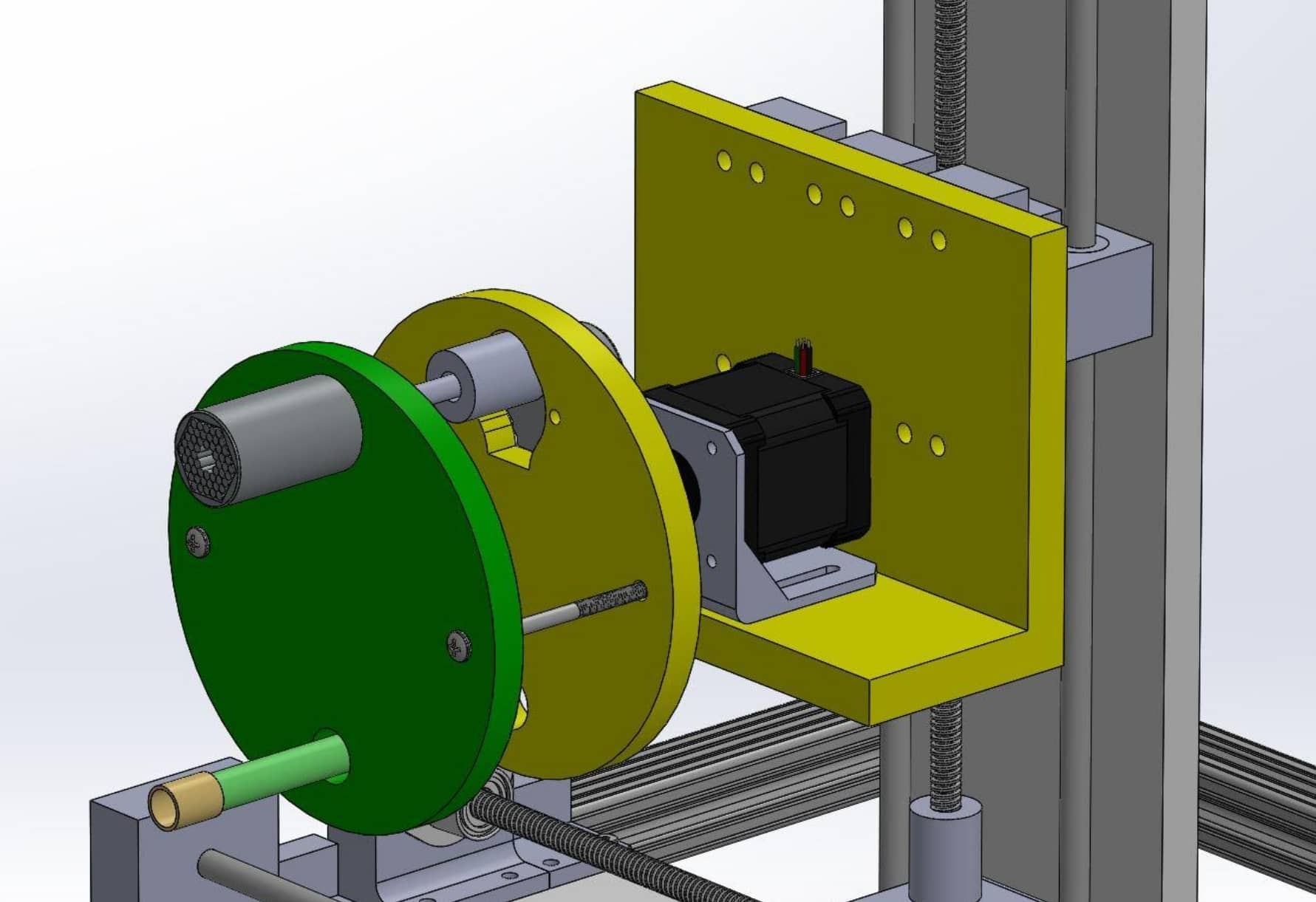
Wax Sculpting Artist Lathe using Robot Arm, IK and Path-Planning
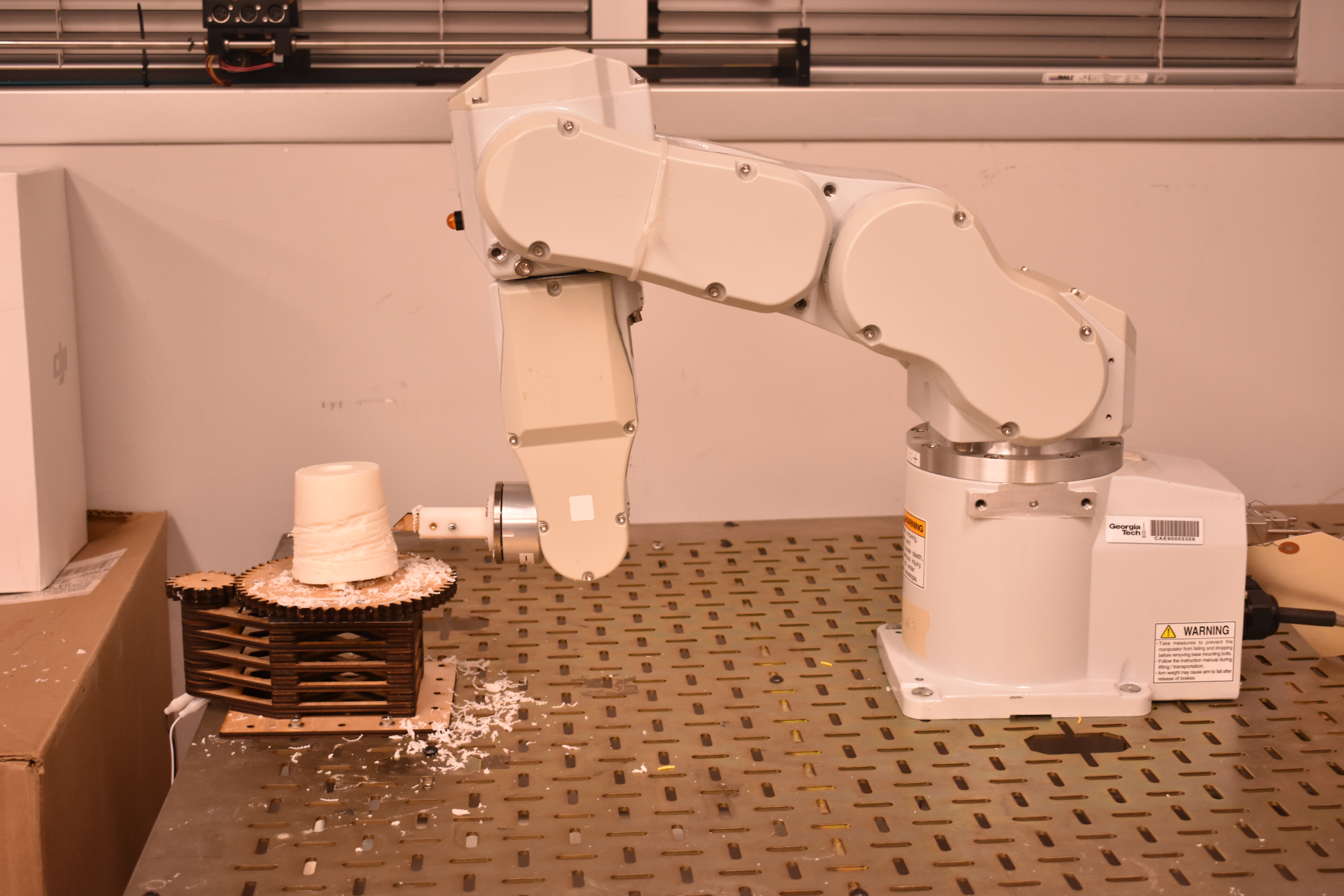

Task: Built an artist lathe robotic system (for a rotating wax cylinder, user-defined sculpting shape) using Epson C4 Industrial Robot Manipulator. Programmed sculpting algorithm for arm on Matlab (using Inverse Kinematics, Path-Planning). Built DC-motorized rotating base for wax and end-effector system.
Key Concepts: Epson C4 Manipulator, Matlab, Inverse Kinematics, Trajectory Tracking, Path-planning, DC motors, Laser Cutting & Fabrication, End-effector
Velocity-Controlled Remote Control car system

Task: Designed and developed a remote-controlled trajectory-tracking vehicle system with closed-loop velocity control sensory feedback. Accelerometer used Programmed PID control in C using the MSP432 microcontroller.
Key Concepts: Mechatronics, C, PID Velocity Control, Accelerometer, Microcontroller